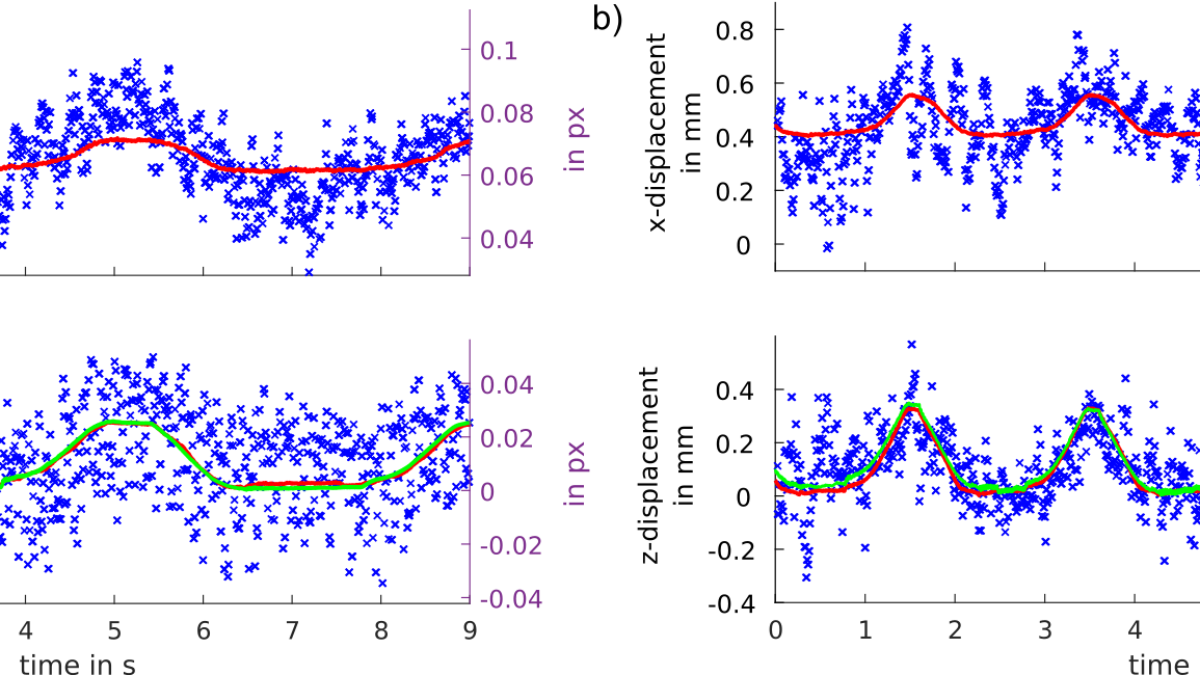
Verschiebung bestimmter Knoten des Prototyps über die Zeit: Vergleich der optischen Messung (blau), modellbasierte Zustandsschätzung (grün) und Messung mit einem Vibrometer(rot).
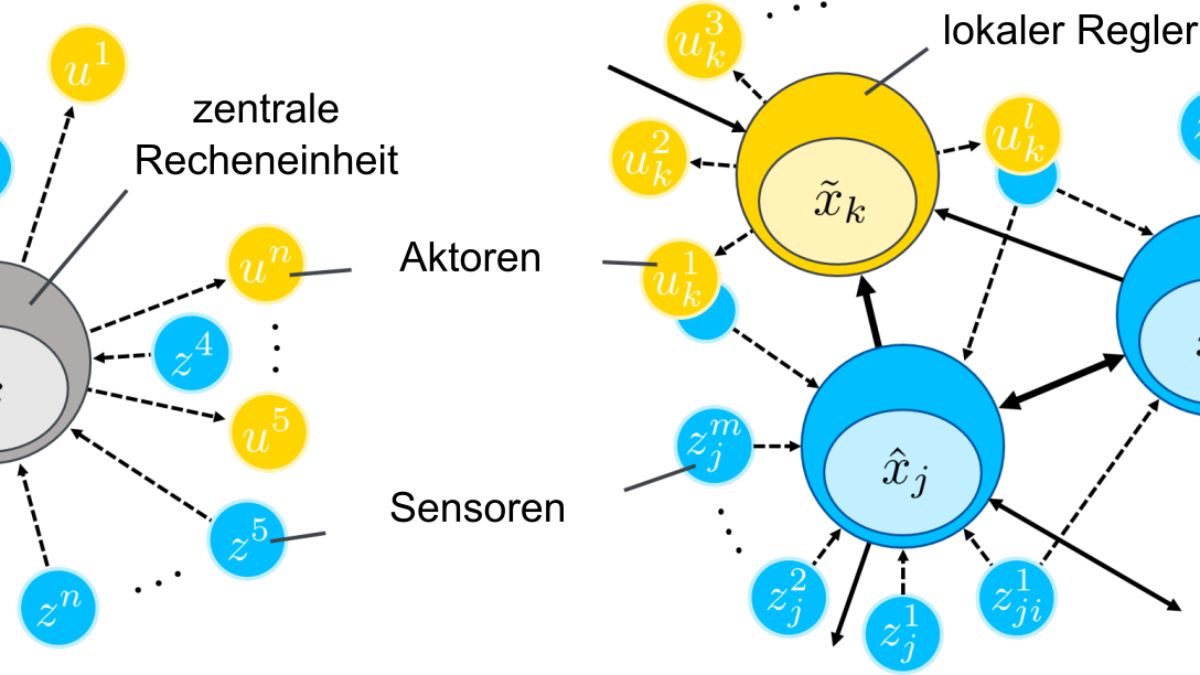
Grundlegende Idee von zentraler gegenüber dezentraler Zustandsschätzer-/ Beobachter- und Reglerstruktur.
Bild: (c) ISYS
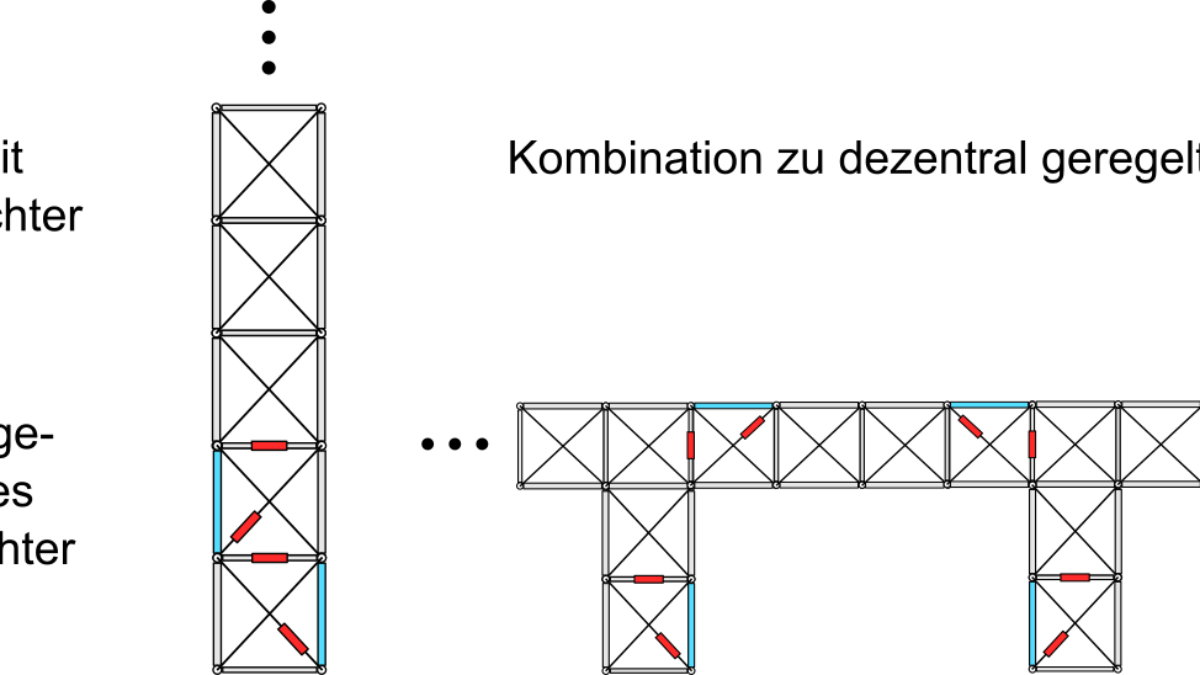
Grundlegende Idee der Modularisierung: Zusammensetzung komplexer Strukturen aus aktiven und passiven Einzelelementen.
Bild: (c) ISYS
Förderphase II
Im Teilprojekt B02 wird untersucht, mit welchen Methoden sich der Systemzustand flächiger bzw. weitspannender Tragwerke möglichst genau schätzen lässt und welche Messprinzipien sich eignen, um die Deformation zu bestimmen.
Um die Struktur eines adaptiven Tragwerks gezielt anpassen zu können, muss der aktuelle Systemzustand bekannt sein. Allerdings werden einige dieser Systemzustände aus verschiedenen Gründen nicht direkt gemessen. Sie sollen daher geschätzt werden und zwar auf Basis der Größen, die gemessen werden, mit systemdynamischen Methoden der Sensorfusion und Zustandsschätzung. Auf der messtechnischen Seite wird zum einen konventionelle Sensorik verwendet (Beschleunigungsgeber, Gyroskope, Dehnmessstreifen) und zum anderen wird eine neuartige optische Sensorik entwickelt.
Zusammenfassung der ersten Förderperiode des Sonderforschungsbereichs:
- Um modellbasierte Sensorfusion und Schätzverfahren verwenden zu können, wurden Tragwerke (Stab- und Balkentragwerke) modelliert. Unter anderem wurde die Energie-basierte Port-Hamilton-Modellierung für Stab- und Balkentragwerke erarbeitet.
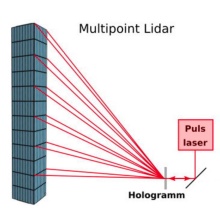
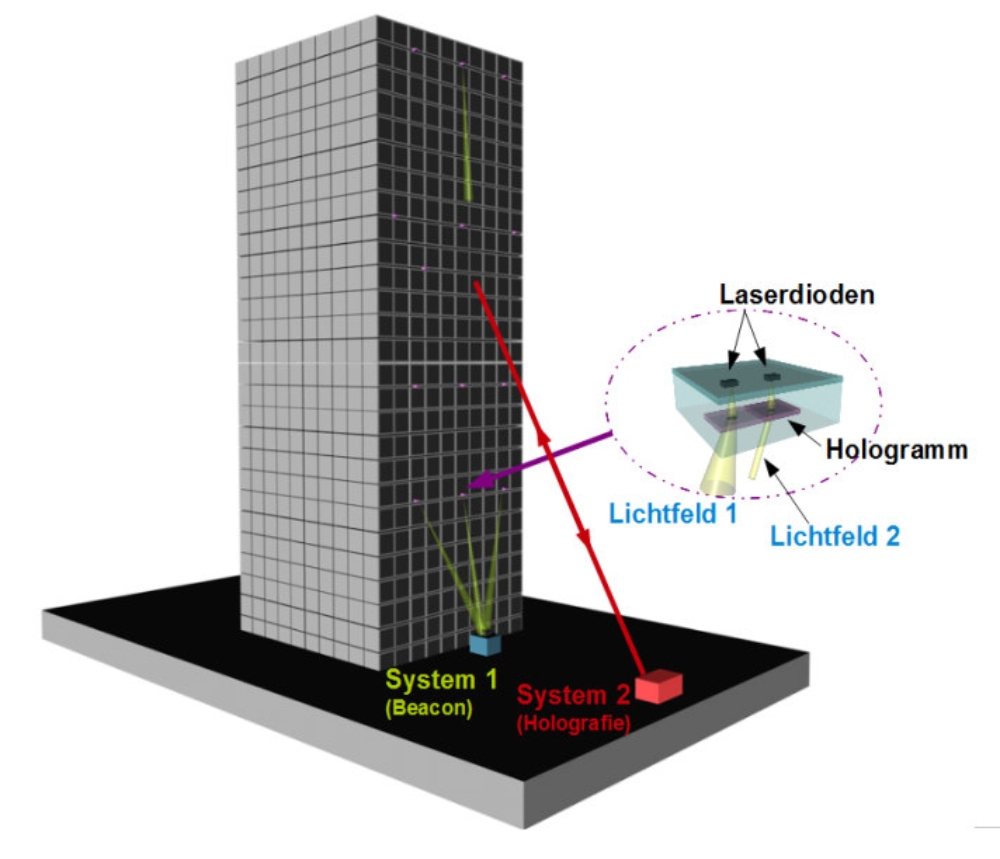
- Die Multipoint-Sensorik wurde entwickelt und ermöglicht genaue Deformationsmessungen auch unter schwierigen Umgebungsbedingungen (z.B. Nebel, Schneefall, helle Sonne). Im Wesentlichen werden Emitter (LEDs) am Tragwerk angebracht und deren Positionsveränderung mit Kameras erfasst. Entscheidend ist, dass das Emitter-Bild mit einem computergenerierten Hologramm vervielfältigt wird, bevor es auf den Foto-Sensor trifft.
- Die verfügbaren Messdaten wurden per Sensorfusion kombiniert und zur Zustandsschätzung verwendet.
- Bei Sensorfusion und Zustandsschätzung treten einige Herausforderungen auf, wie z.B. unterschiedliche Abtastraten, Totzeiten, der Komplexitätsgrad des Systems und die Distanzen, über die Daten übertragen werden müssen (insbesondere bei großen Tragwerken).
- Ein wesentlicher Ansatz bezüglich des Komplexitätsgrads und der Distanzen ist Dezentralisierung der Sensorfusion und Zustandsschätzung. Es wurden verteilte und modulare Ansätze untersucht. Die oben erwähnte Port-Hamilton-Modellierung hat günstige Eigenschaften in Bezug auf Modularisierung.
Ausblick auf die zweite Förderperiode:
- Einerseits wird die bereits bestehende optische Messmethode mit LEDs optimiert (Robustheit, Zuverlässigkeit und Geschwindigkeit).
- Dazu wird auch eine neue optische Messmethode basierend auf einem holographischen Teleobjektiv für Messungen von weitspannenden Strukturen (Brücken) untersucht.
- Andererseits soll die Multipoint-Sensorik von punktförmigen Messungen (LEDs) auf linien- und flächenförmige Messungen weiterentwickelt werden.
- Die Methoden für Stab- und Balkentragwerke sollen auf Flächen- und weitspannende Tragwerke übertragen bzw. erweitert werden. Dazu soll auch die Port-Hamilton-Modellierung weiter erarbeitet werden.
- Die Dezentralisierung stellt auch in der zweiten Förderperiode einen zentralen Aspekt dar.
- Außerdem soll untersucht werden, wie mit Störgrößen (z.B. Windlasten) umgegangen werden kann.
Teilprojektleiter:innen
- Prof. Dr.-Ing. Cristina Tarín Sauer, Institut für Systemdynamik
- Dr.-Ing. Tobias Haist, Institut für Technische Optik
Förderphase I
Um die Struktur eines adaptiven Tragwerks gezielt anpassen zu können, muss der aktuelle Gebäudezustand bekannt sein. Da sich einige Größen nicht direkt messen lassen, sind systemdynamische Methoden der Zustandsschätzung und Sensorfusion notwendig. Um Messgrößen bereitzustellen, wird eine neuartige optische Messtechnik entwickelt und mit Methoden der konventionellen Sensorik (Beschleunigungsgeber, Gyroskope, Dehnmessstreifen) kombiniert. Die optische Messtechnik soll zusammen mit der Zustandsschätzung auch unter schwierigen Umgebungsbedingungen eine hochgenaue und zuverlässige Positionsbestimmung für Bauwerke großer Dimensionen garantieren. Vor dieser Herausforderung werden zwei sich ergänzende Ansätze untersucht, um die optische Distanzmessung zu erfassen.
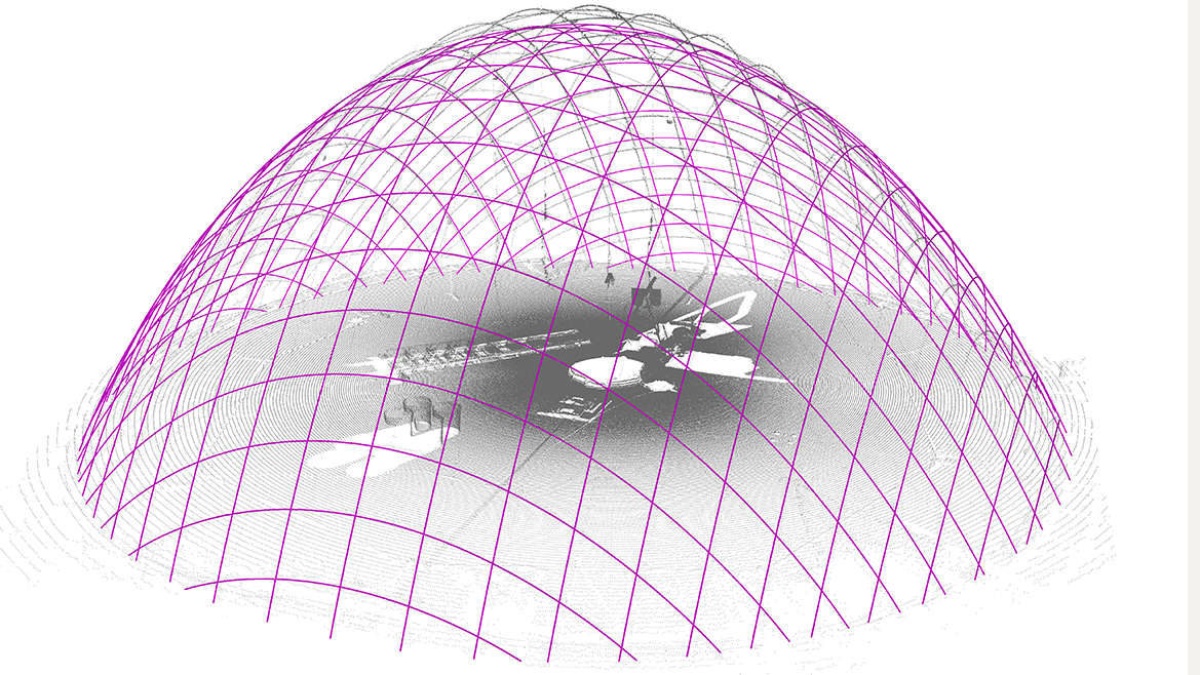
Bauausführung vermessen mittels Laserscan (grau) im Vergleich zur Idealform (magentafarben) Foto: (c) ILEK
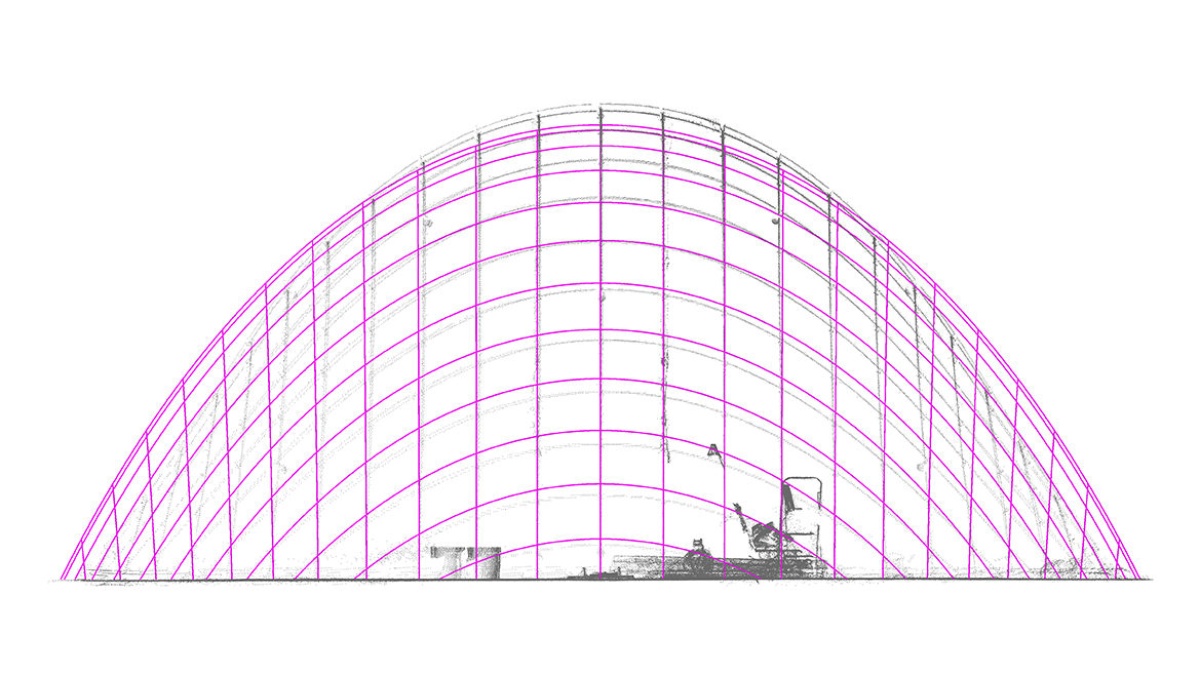
Foto: (c) ILEK
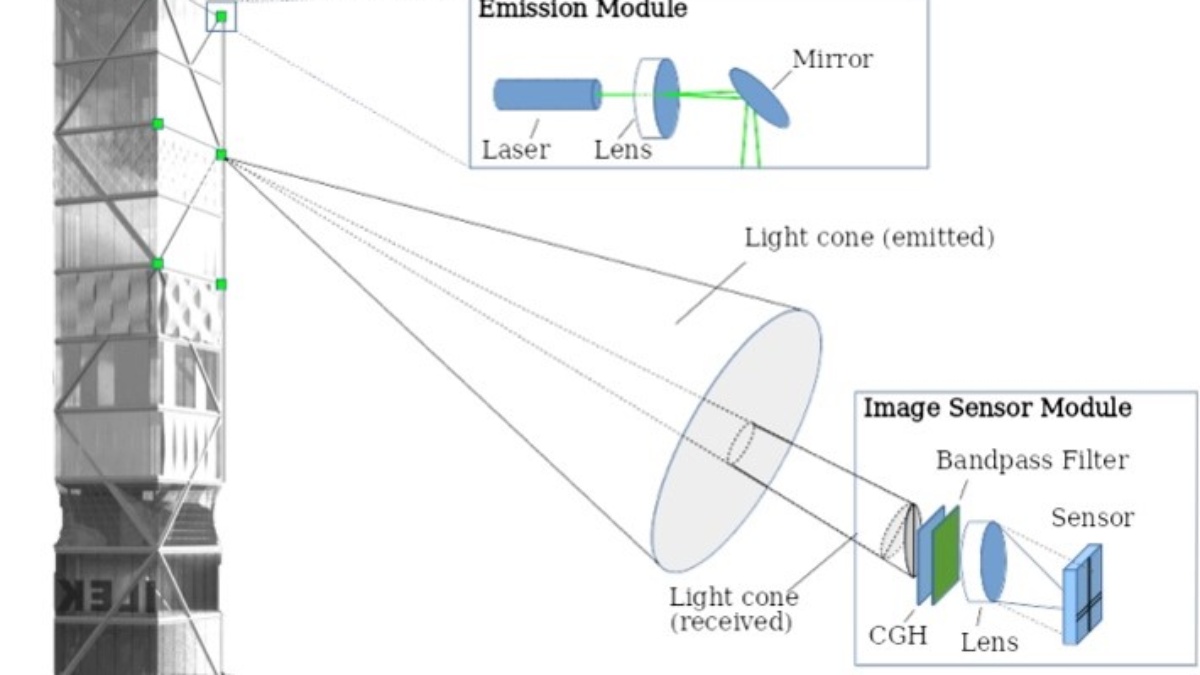
Foto: (c) ITO

Foto: (c) ISYS
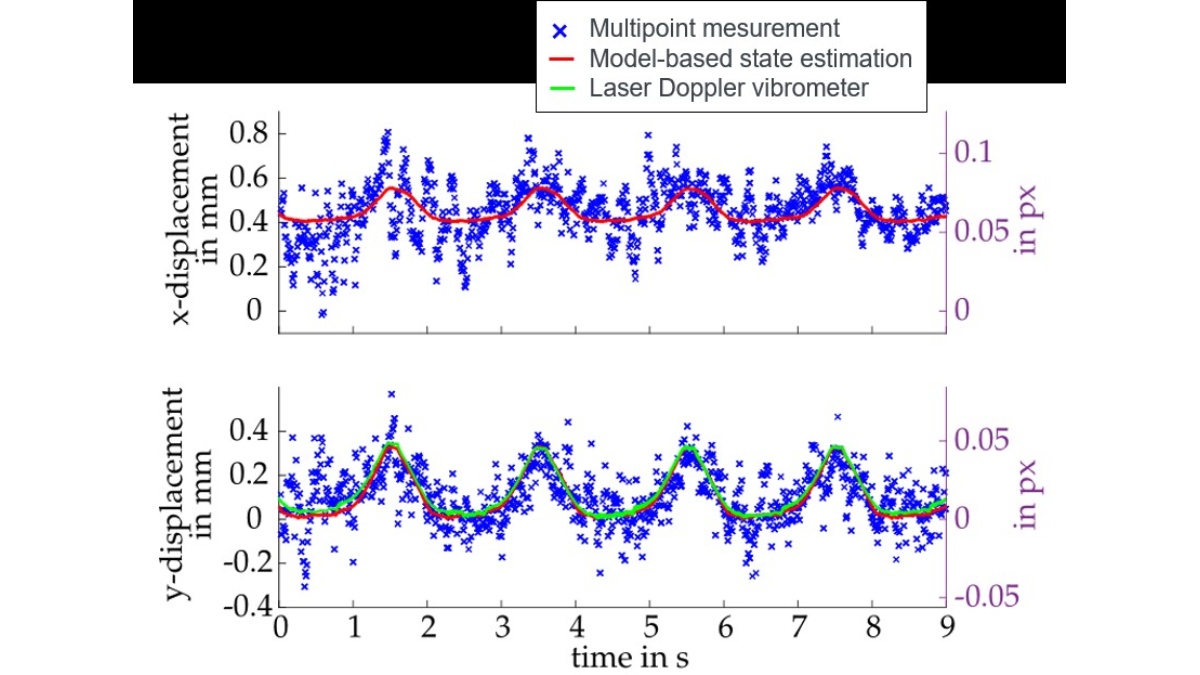
Foto: (c) ISYS
Foto: (c) ISYS
Das Ziel dieses Teilprojekts ist es, die insgesamt verfügbaren Sensorinformationen zu fusionieren und das Ergebnis als Schätzung des Systemzustands wiederzugeben. Diese Fusion muss in Echtzeit durchgeführt werden, da der Systemzustand zu jedem Zeitpunkt für die Steuerung und Regelung (Teilprojekt B04) zur Verfügung stehen muss.
Daraus ergeben sich für das Teilprojekt B02 folgende Fragestellungen:
- Welche Ansätze eignen sich, um die präzise optische Distanzmessung von Bauwerken großer Dimensionen zu ermöglichen?
- Wie lässt sich Lichtstreuung vermeiden um bei ausgedehnten Bauwerken trotz schwieriger Umgebungsbedingungen eine möglichst genaue Positionsbestimmung zu erzielen?
- Wie lassen sich konventionelle Sensorik und das optische Messsystem bei der Bestimmung der Gebäudedeformation in Echtzeit fusionieren?
Der zunächst und vorrangig untersuchte Ansatz zur optischen Distanzmessung basiert auf der möglichst genauen Positionsbestimmung von kleinen, im Gebäude stationär befestigten, aktiven Lichtemittern. Diese können z. B. an der Fassade oder in Aufzugsschächten befestigt sein. Die Position wird durch eine bildverarbeitungsbasierte Auswertung ermittelt. Hierzu strahlen die mit preisgünstigen computergenerierten Hologrammen realisierten Emitter in Richtung der bildaufnehmenden Kamera optimierte Lichtmuster. Indem die sequentiell aufgenommenen Bilder verrechnet werden, können wetterbedingte Störungen teilweise eliminiert werden.
Im Rahmen eines zweiten, komplementären Ansatzes wird untersucht, wie sich Lichtstreuungen trotz widriger Wetterbedingungen vermeiden lassen. Da die Messung durch eine holografische Erfassung an beliebigen Punkten auf der Fassade erfolgen kann, muss das Gebäude nicht modifiziert werden. Ziel ist es, mit kurzkohärentem Licht die Streuung bei ungünstigen Wetterbedingungen bestmöglich zu unterdrücken um eine ideale Distanzmessung zu ermöglichen. Messstellen auf großflächigen Strukturen können durch ein Scansystem sequentiell abgetastet werden. Für diese Methodik sollen im Rahmen des Projekts erste Voruntersuchungen durchgeführt werden.
Um die Gebäudedeformation zu bestimmen, erfolgt eine Fusion der Distanzinformationen des optischen Messsystems und der konventionellen Sensorik. Während das optische Messsystem Informationen über die Distanz zur Gebäudehülle gewinnt, kann die konventionelle Sensorik auch im Inneren des Gebäudes angebracht werden. Im Vergleich zur kontinuierlich hohen Abtastrate der konventionellen Sensorik, tastet das optische Messsystem Messpunkte niederfrequent ab. Das Filter kennt die physikalischen Gleichungen, die das Verhalten des Bauwerks beschreiben und soll so ausgelegt werden, dass das optische Messsystem die Messpunkte dynamisch adaptiert, um ein optimales Signal-Rausch-Verhältnis zu erlangen. Ziel ist es, das System mit Hilfe von verteilten Ansätzen modularisierbar sowie rekonfigurierbar zu machen und die konventionellen Sensoren mit neuartigen Messprinzipien zu fusionieren. In einem ersten Schritt wird ein klassisches, globales Filter entworfen. Anschließend werden sinnvolle Subsysteme und Schnittstellen definiert, um die Filter lokal zu implementieren, wodurch Robustheit und Leistung erhöht werden sollen.
Die Ergebnisse des vorliegenden Projekts, die geschätzten Zustandsgrößen, werden direkt für die Steuerung bzw. Regelung der Aktoren in Teilprojekt B04 verwendet und an Teilprojekt B05 zur dynamischen Multiskalenvisualisierung weitergegeben.
Adaptive Strukturen sind meist heterogene Systeme die nicht nur aus rein mechanischen Komponenten bestehen. Für solche Strukturen eignen sich Port-Hamilton-Systeme zur Modellierung. Der energiebasierte Ansatz ermöglicht es Teilsysteme aus unterschiedlichen physikalischer Domänen über den Energiefluss an den Schnittstellen zu koppeln. So lassen sich direkt Multi-Domänen-Modelle erstellen, die darüber hinaus die für den Regler- und Beobachterentwurf günstige Eigenschaft der Passivität aufweisen. In Kooperation mit Teilprojekt A06 wird an einem Open Source Framework gearbeitet zur Modellierung von Tragwerken als Port-Hamilton-Systeme (https://github.com/awarsewa/ph_fem).
Teilprojektleiter
- Prof. Dr.-Ing. Cristina Tarín, Institut für Systemdynamik
- Dr. Wolfgang Osten, Institut für Technische Optik
- Dr.-Ing. Tobias Haist, Institut für Technische Optik
Ansprechpersonen

Amelie Zeller
M.Sc.Doktorand

Andreas Gienger
M. Sc.Wissenschaftlicher Mitarbeiter

Flavio Guerra
M. Sc.Doktorand