
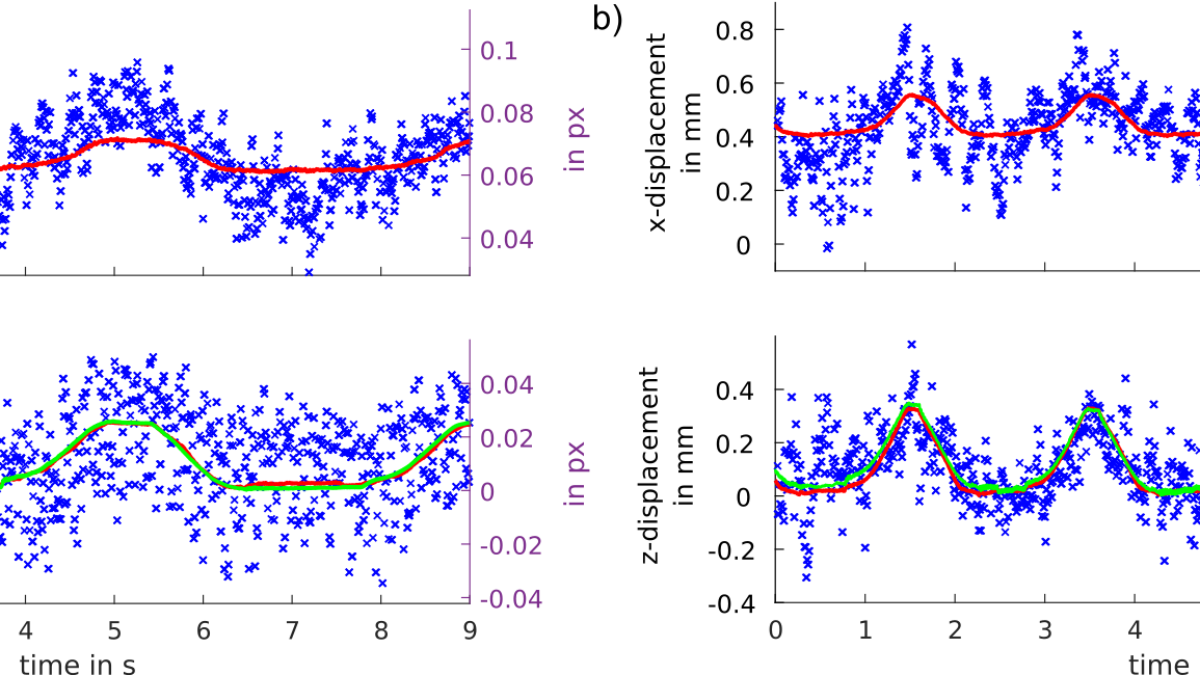
Displacement of certain nodes of the prototype over time: comparison of optical measurement (blue), model-based state estimation (green) and measurement with a vibrometer(red).
Image: (c) ISYS
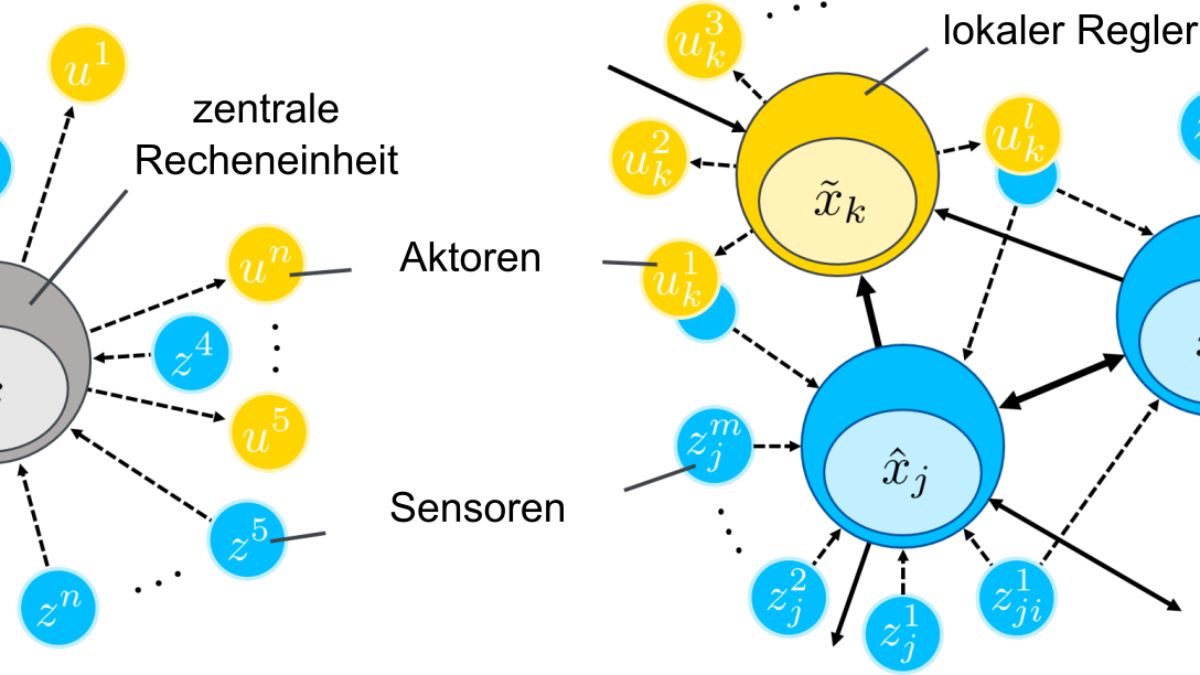
Fundamental idea of centralized versus decentralized state estimator/observer and controller structure.
Image: (c) ISYS
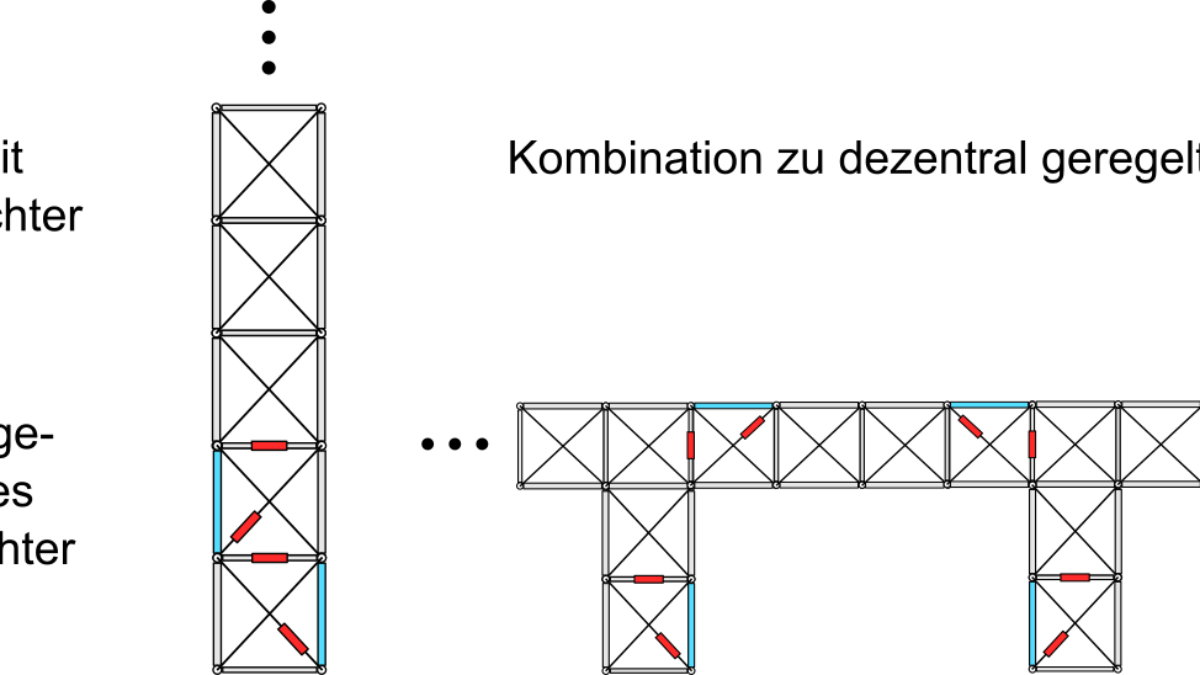
Basic idea of modularization: composition of complex structures from active and passive individual elements.
Image: (c) ISYS
Funding Phase II
Subproject B02 investigates which methods can be used to estimate the system state of shell support or wide-span structures as accurately as possible and which measurement principles are suitable for determining the deformation.
In order to be able to adapt the structure of an adaptive structural system in a specific way, the current system state must be known. However, some of these system states are not directly measurable for various reasons. Therefore, they are to be estimated based on the measured values using sensor fusion and state estimation methods. On the side of measurement technology, conventional sensors are used on the one hand (accelerometers, gyroscopes, strain gauges) and a novel optical measurement system is developed on the other hand.
Summary of the first funding period of the Collaborative Research Center:
- To enable the application of model-based sensor fusion and state estimation methods, load-bearing structures (beam and bar structures) were modeled. Among other model techniques, energy-based Port-Hamiltonian modeling for beam and bar structures was developed.
- Multipoint sensor technology has been developed and allows accurate deformation measurements even under difficult environmental conditions (e.g. fog, snowfall, bright sun). Essentially, emitters (LEDs) are attached to the load-bearing structure and their position changes are recorded with cameras. Crucially, a computer-generated hologram duplicates the image of the emitter before it hits the photo sensor.
- The available measurement data was combined by sensor fusion and used for state estimation.
- Several challenges arise in sensor fusion and state estimation, such as different sampling rates, time delays, the complexity level of the system, and the distances over which data must be transmitted (especially for large structures).
- A key approach to address the complexity level and distances is decentralization of sensor fusion and state estimation. Distributed and modular approaches have been investigated. The aforementioned Port-Hamiltonian modeling has favorable properties in terms of modularization.
Outlook for the second funding period:
- On the one hand, the existing optical measurement system using LEDs will be optimized (robustness, reliability and speed).
- For this purpose, a new optical measurement method based on a holographic telephoto lens for measurements of wide-span structures (bridges) will also be investigated.
- On the other hand, multipoint sensor technology will be further developed from point measurements (LEDs) to line and area measurements.
- The methods for beam and bar structures are to be transferred or extended to shell suppoert and wide-span structures. Port-Hamiltonian modeling is also to be further developed for this purpose.
- Decentralization is a central aspect in the second funding period, too.
- In addition, it will be investigated how disturbance variables (e.g. wind loads) can be handled.
Literatur:
Rapp, M. Heidingsfeld, M. Böhm, O. Sawodny und C. Tarín. „Multimodal sensor fusion of inertial, strain, and distance data for state estimation of adaptive structures using particle filtering“. In: IEEE Int. Conf. on Advanced Intelligent Mechatronics (AIM). 2017
A.Warsewa, M. Böhm, P. Rapp, O. Sawodny und C. Tarín. „Decentralized and Distributed Observer Design for Large-Scale Structures using Dynamic Condensation“. In: IEEE Int. Conf. on Automation Science and Engineering (CASE). 2019
Warsewa, J. L. Wagner, M. Böhm, O. Sawodny und C. Tarín. „Networked Decentralized Control for Adaptive Structures“. In: Journal of Communications (2020)
Warsewa, J. L. Wagner, M. Böhm, O. Sawodny und C. Tarín. „Decentralized LQG control for adaptive high-rise structures“. In: Proc. of the IFAC World Congress. (akzeptiert). 2020
Guerra, T. Haist, A. Warsewa, S. Hartlieb, W. Osten und C. Tarín. „Precise building deformation measurement using holographic multipoint replication“. In: Applied Optics (2020)
Warsewa, M. Böhm, F. Guerra, J. L. Wagner, T. Haist, C. Tarín und O. Sawodny. „Selftuning state estimation for adaptive truss structures using strain gauges and camera-based position measurements“. In: Mechanical Systems and Signal Processing (2020)
Guerra, S. Hartlieb, K. Hoppe, T. Haist und W. Osten. „Improved 3D-position detection by holographical point replication“. In: 7-th EuropeanWorkshop on Visual Information Processing. 2018
Guerra, S. Hartlieb, A. Warsewa, T. Haist, W. Osten und O. Sawodny. „Holographic point replication as a sensor-enhancing technique for adaptive building control“. In: Photonic Instrumentation Engineering VII. 2020
Guerra, S. Hartlieb, A. Warsewa, T. Haist, W. Osten und O. Sawodny. „Deformation measurement of large buildings by holographical point replication“. In: Optics for Arts, Architecture, and Archaeology VII. 2019
T. Haist, A. Steinitz und F. Guerra. „Increasing the accuracy of imaging-based dimensional measurements“. In: Measuring Complex Optical Systems and Components. 2020
Subproject Leader
- Prof. Dr.-Ing. Cristina Tarín, Institute for System Dynamics
- Dr.-Ing. Tobias Haist, Institute of Applied Optics
Funding Phase I
For manipulating the structure of an adaptive building, knowledge of its current state is essential. Various quantities of interest are not directly measurable which is why sensor fusion and state estimation methods are required. As an addition to conventional sensors (accelerometers, gyroscopes, strain gauges), novel optical measurement techniques are developed. In combination with the estimation algorithms, they are to guarantee position measurement with high precision and reliability even under challenging environmental conditions for structures of large spatial extension. Two complementary approaches for realizing the optical distance measurement are investigated.
Aim of this project is to apply sensor fusion to all available sensor signals in order to obtain a state estimate of the system. Sensor fusion has to be carried out in real-time, as the state must be available for control (project B04) at all times.
Given the above, project B02 seeks to answer the following questions:
- Which approaches are suitable for realizing precise optical distance measurements of structures with large spatial extension?
- Can we avoid light scattering to a degree that allows for precise determination of position even under challenging environmental conditions?
-
How is sensor fusion for conventional sensors and the optical measurement system carried out in real-time?
The first and primarily investigated approach for the optical distance measurement is based on determining as precisely as possible the position of active light emitters attached to the building. The emitters are mounted for instance to the building’s façade or to elevator shafts. They are realized cost-effectively using computer-generated holograms that are projected onto a camera system. Advanced image processing techniques allow for partial elimination of disturbances and artefacts due to weather conditions.
In a complementary approach, it is investigated how light scattering can be avoided despite adverse weather conditions. Since the measurement is performed by scanning arbitrary points on the façade, the building does not need to be modified. The aim is to suppress the scattering due to unfavorable weather conditions with short coherent light obtaining an ideal distance measurement. Measurement points on structures with large spatial extension can be scanned sequentially. For this approach, preliminary studies will be carried out as part of the project.
Building deformation is determined by applying sensor fusion on the distance information obtained from both the optical measuring system and the conventional sensor technology. While the optical measuring system collects information on the outer faces of the structure, conventional sensor technology is usually installed inside the building. Compared to the high sampling rate of conventional sensors, the optical measuring system samples measuring points at lower frequencies. A filter that uses a mathematical model for behavior of the building is designed to dynamically adapt the location of measuring points in order to achieve an optimal signal-to-noise ratio. The aim is to make the system modular and reconfigurable using distributed approaches and to merge conventional sensors with novel measuring principles. In a first step, a global filter is designed. Then, feasible subsystems and interfaces are defined to implement the filters locally, thereby increasing robustness and performance.
The resulting estimated state variables of this project, are used to control the actuators in project B04 and passed on to project B05 for dynamic multiscale visualization.
Most adaptive structures are heterogeneous systems that also include non-mechanical parts. For such structures, port-Hamiltonian systems are a promising modeling technique. The energy-based approach allows for a coupling of subsystems from different domains via the power flow at the interfaces. This way, multi-domain models can be directly created which have the additional advantageous property of being structurally passive. This is helpful for control design. In cooperation with subproject A06, an open source framework for the modelling of truss structures and frames as port-Hamiltonian systems is being developed (https://github.com/awarsewa/ph_fem).
Subproject Leader
- Prof. Dr.-Ing. Cristina Tarín, Institute for System Dynamics
- Dr.-Ing. Tobias Haist, Institute of Applied Optics
Contact

Amelie Zeller
M.Sc.Doctoral Researcher

Andreas Gienger
M. Sc.Wissenschaftlicher Mitarbeiter

Flavio Guerra
M. Sc.Doctoral Researcher