
Control Strategy
Image: (c) ISYS
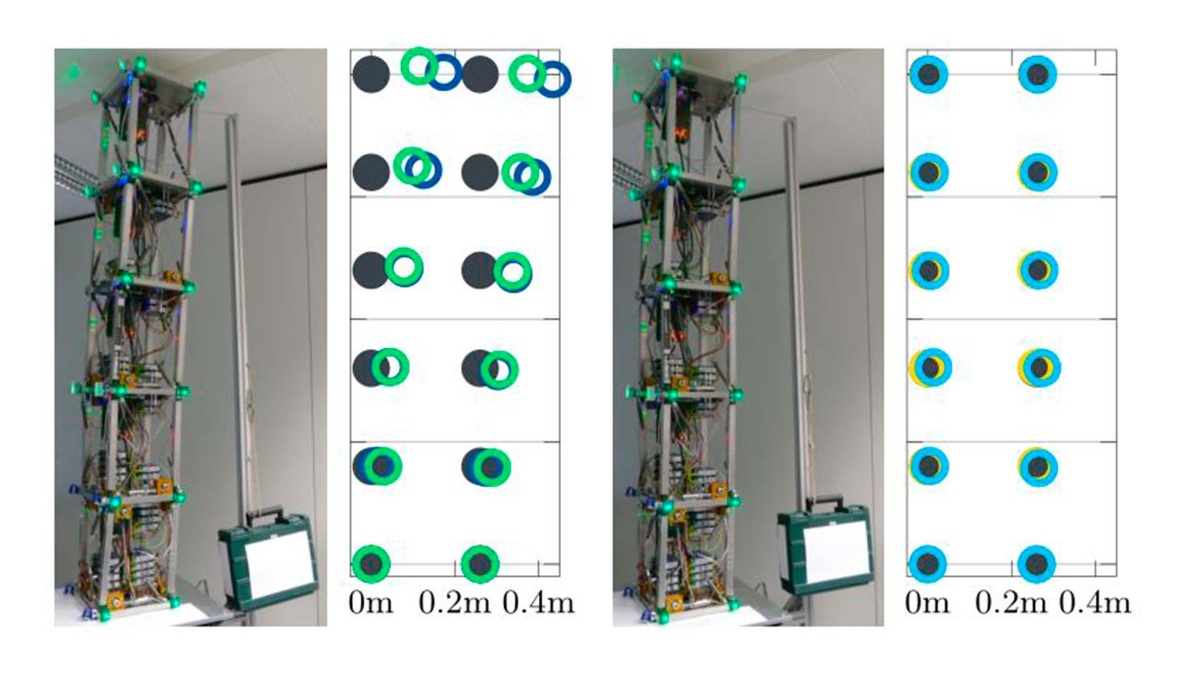
Static load compensation on the scale model. From left to right: (1) scale model with load, (2) comparison deflection under load, simulation (dark blue) and measurement (green), (3) photo compensated deflection, (4) comparison compensated deflection, simulation (yellow) and measurement (blue)
Image: (c) ISYS

Prototype frame
Image: (c) ILEK

Results of actuator placement with 3 actuators in the integrated fluid actuator for a uniformly distributed load (arrows) and deflection line without actuation (dark blue) and with actuation (light blue)
Image: (c) ISYS

Hydraulic actuators in the demonstrator tower.
Image: (c) ILEK
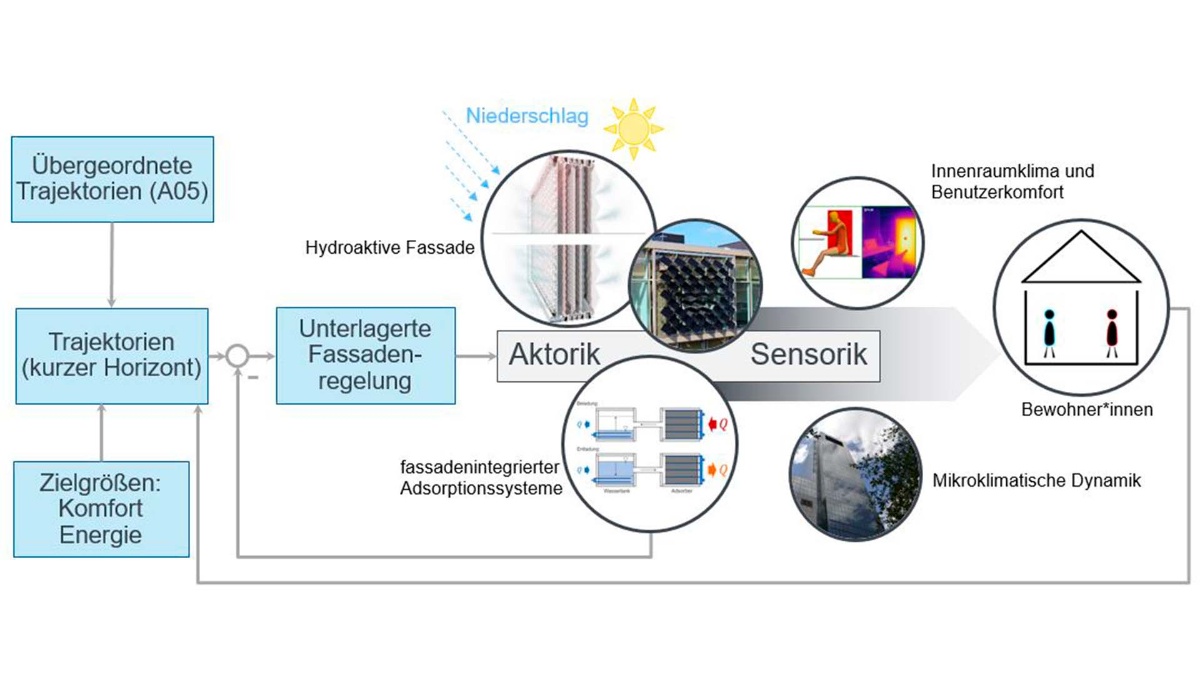
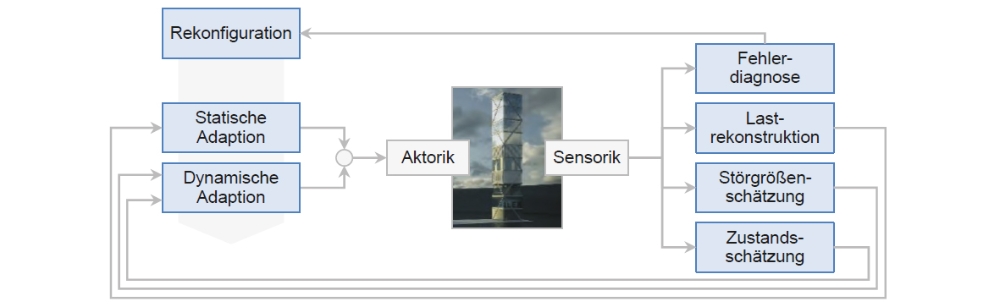
Control concept for adaptive facades.
Image: (c) ISYS
Funding Phase II
Project B04 is divided into two parts. The first part focuses on modeling and control design for adaptive structures. One main aspect is the modeling of large beam structures composed of different elements (beams, plates, etc.). In this context, methods for substructuring of complex structures based on interaction measures are developed. Subsequently, optimal decentralized control concepts are applied to these substructures. Further, the control design aims at homogenizing stress distribution over the building parts in the context of wear leveling and thus the increase of safety and life expectancy of the structure. Furthermore, an algorithm for optimal distribution of the input forces over the two controller goals - static load compensation and dynamic vibration damping – is developed.
A further key aspect of the project is modeling of adaptive surface structures and the subsequent control design with focus on disturbance compensation. Hereby, distributed parametric approaches are applied, since the compensation of locally and temporally varying loads requires locally distributed inputs.
The generalization of the methods to further structures, such as bridges, also plays an essential role in the research work. The focus here is on minimizing load cycles in order to extend the life expectancy of bridges.
An additional focus is set on the experimental validation on the adaptive high-rise building, constructed on the site of University of Stuttgart (Z01), on the fluidically actuated plate structure, developed in project C02, and on the adaptive bridge from C07.
The second part of B04 deals with modeling and control of novel adaptive façade concepts. The hydroactive façade from C01 absorbs water from precipitation directly on the outer skin of the building. This water is later either evaporated from the façade for latent cooling of the urban space or used as gray water in toilets or washing machines, for example.
Subproject B04 develops a mathematical model to describe all relevant physical effects in and around the multi-layer hydroactive façade using a distributed parameters approach, which leads to a convection-diffusion PDE. Primary goals are maximizing the water uptake of the façade and controlling the water release from the façade. Furthermore, inter-day strategies for the utilization of the collected water are developed.
For the thermal influence of the interior, the façade-integrated adsorption system from C06 is considered, for which the subordinate control concept is designed in B04. Given the operating points by subproject A05, the design will take the predicted weather conditions, and the changing user requirements into account. This leads to a mixed-integer optimal control problem due to the discrete-valued manipulated variables.
Modeling of the indoor climate is indispensable for the representation of the user comfort. For this, a unizonal model of the temperature and humidity dynamics is used.
Subproject Leader
- Prof. Dr.-Ing. Oliver Sawodny, Institute for System Dynamics
- Dr.-Ing. Michael Böhm, Institute for System Dynamics
Funding Phase I
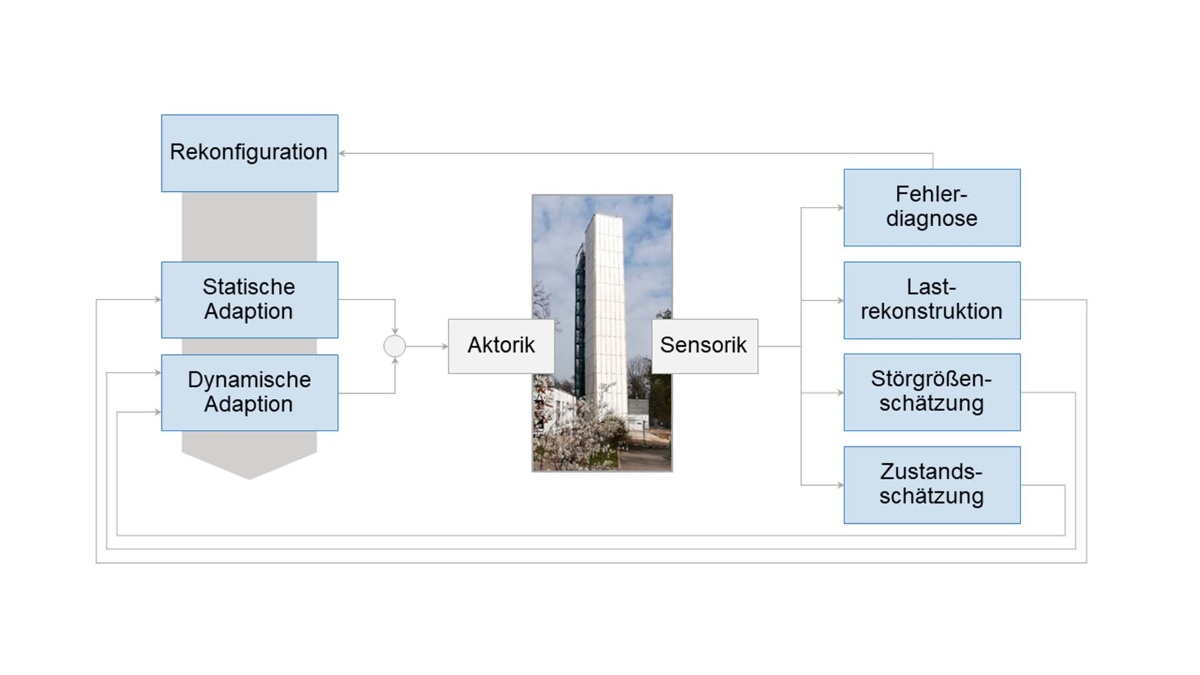
A key aspect of adaptive buildings is their automated response to stationary and dynamic loads, both of internal or external origin and a priori unknown. This functionality has to be guaranteed over the entire lifetime. The adaptation requires a control design, in which the truss structure is manipulated using the available actuators based on estimated states and loads. Design and experimental validation of these methods is a primary goal of this project.
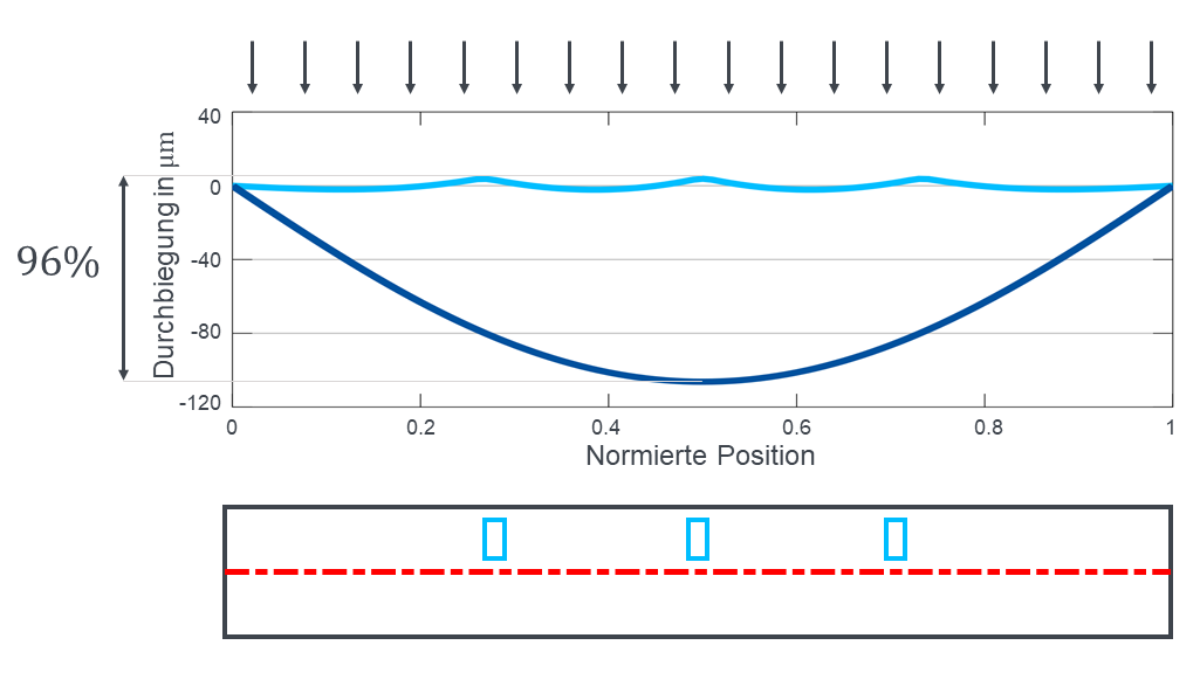
Image: (c) ISYS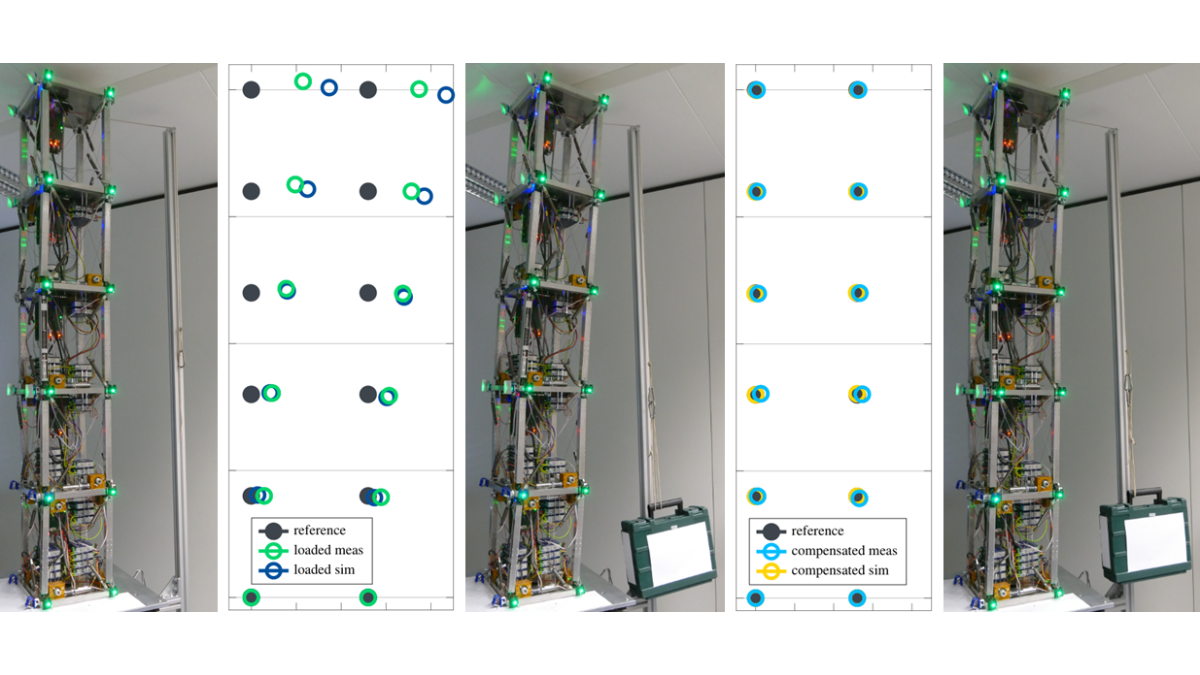 Image: (c) ISYS
Image: (c) ISYS
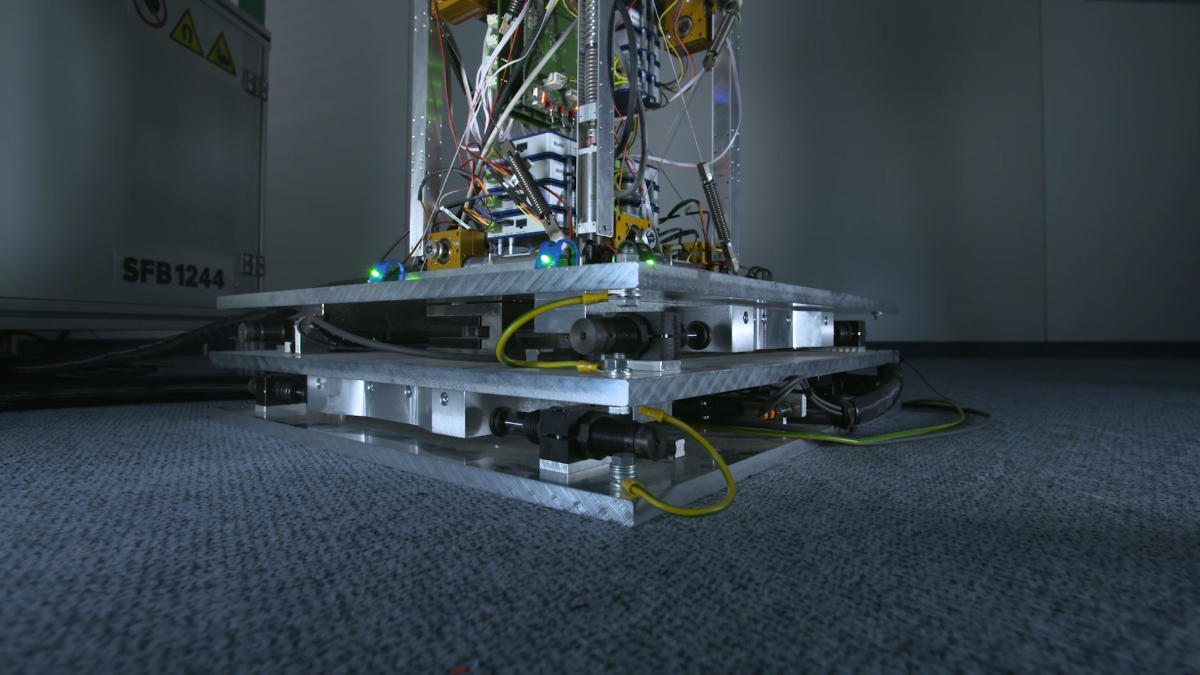
Image: (c) ISYS

Image: (c) ISYS

Image: (c) ILEK
The project addresses the following research questions:
- Which mathematical models are suited for the control design of adaptive structures?
- What are adaptive control algorithms that can automatically adapt to changes of the system?
- How can we design local controllers, which together guarantee global stability?
- How can distributed control concepts replace current models that rely on a hierarchical structure, thus rendering a “master controller” obsolete. Functional groups are created dynamically, based on the current state.
- How can we validate the performance of the developed control algorithms in experiments?
From a control engineering point of view, adaptive structures differ in several aspects from mechatronic systems and systems of process engineering. Through their functional elements with integrated actuators and sensors, many inputs and outputs are present. Thus, the input – output behavior of the system is of high dimension, rendering the control design a problem of multiple-input, multiple-output (MIMO) control.
Classical control concept for MIMO-control assume a central processing unit. The controller is designed and implemented as a centralized controller with access to all sensor outputs and actuator inputs. However, this concept is not suitable for adaptive buildings due to their multitude of active elements distributed over the entire structure, with large distances in between leading to high communication delays if the connections are realized using a common bus topology, e.g. Ethernet. However, these elements are, of course, physically coupled. This presents a challenge, as the project B04 aims at developing distributed control concepts, which operate on local hardware and rely on local sensor measurements and actuators only. To enable the exchange of information on demand, these local controllers will be digitally interconnected. Consequently, optimizing the underlying network structure offline and online is part of our research in this project.
Conventional control concepts typically lack the ability to adapt to drastically changing structure geometries and parameters of a building. In this project, we want to develop reconfigurable control concepts, which adapt autonomously to changes of the underlying controlled system. By focusing especially on the reconfiguration in the case of actuator failures, this research significantly improves the reliability and usability of an entire adaptive building.
Furthermore, integrated fluidic actuators from C02 are modelled as a system with distributed parameters. Based on this, a system analysis provides valuable insights for the system design in C02. B04 is also concerned with model based design of the underlying pressure control loop and the superimposed static compensation.
Subproject Leader
- Prof. Dr.-Ing. habil. Dr. h.c. Oliver Sawodny, Institute for System Dynamics
Publications
- C. Stein, A. Zeller, S. Dakova, M. Böhm, O. Sawodny, and C. Tarín, “Decentralized state estimation for different substructure layouts of an adaptive high-rise structure,” Mathematical and Computer Modelling of Dynamical Systems, vol. 30, Art. no. 1, Aug. 2024, doi: 10.1080/13873954.2024.2382730.
- M. Gschweng, O. Sawodny, C. Eisenbarth, W. Haase, and M. Böhm, “One-Dimensional Distributed Parameter Modeling of Evaporative Cooling Facades,” in 2024 IEEE/SICE International Symposium on System Integration (SII), Jan. 2024, pp. 906–911. doi: 10.1109/SII58957.2024.10417637.
- S. Dakova, O. Sawodny, and M. Böhm, “Force tracking control for hydraulically actuated adaptive high-rise buildings,” Control Engineering Practice, vol. 146, p. 105899, May 2024, doi: 10.1016/j.conengprac.2024.105899.
- S. Dakova et al., “A Model Predictive Control Strategy for Adaptive Railway Bridges,” IFAC-PapersOnLine, vol. 56, Art. no. 2, 2023, doi: 10.1016/j.ifacol.2023.10.1170.
- S. Dakova, K. Kohl, J. L. Heidingsfeld, O. Sawodny, and M. Böhm, “Optimal Input Distribution Over Multiple Control Objectives for Adaptive High-Rise Structures,” in 2023 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Oct. 2023, pp. 3361–3366. doi: 10.1109/SMC53992.2023.10394044.
- S. Gambarelli et al., “Failure behavior of an adaptive concrete beam with integrated fluidic actuators : non-linear three-dimensional finite element analysis,” Frontiers in Built Environment, vol. 9, p. 1272785, 2023, doi: 10.3389/fbuil.2023.1272785.
- M. Vierneisel, A. Zeller, S. Dakova, M. Böhm, O. Sawodny, and P. Eberhard, “PARAMETRIC MODEL ORDER REDUCTION FOR PARAMETER IDENTIFICATION OF ADAPTIVE HIGH-RISE STRUCTURES,” in 10th ECCOMAS Thematic Conference on Smart Structures and Materials, Dept. of Mechanical Engineering & Aeronautics University of Patras, 2023. doi: 10.7712/150123.9820.443871.
- S. Gambarelli et al., “Failure behavior of an adaptive concrete beam with integrated fluidic actuators: non-linear three-dimensional finite element analysis,” Frontiers in Built Environment, 2023, doi: 10.3389/fbuil.2023.1272785.
- A. Zeller et al., “Bridge State and Average Train Axle Mass Estimation for Adaptive Railway Bridges,” IEEE Xplore® TMECH-01-2023-14914, vol. 28, Art. no. 4, Aug. 2023, doi: 10.1109/TMECH.2023.3277317.
- A. Zeller et al., “State Estimation Using Different Disturbance Models for Adaptive Railway Bridges,” IFAC World Congress, Jul. 2023.
- S. Dakova, J. L. Heidingsfeld, M. Böhm, and O. Sawodny, “An Optimal Control Strategy to Distribute Element Wear for Adaptive High-Rise Structures,” in 2022 American Control Conference (ACC), Jun. 2022, pp. 4614–4619. doi: 10.23919/ACC53348.2022.9867396.
- J. Heidingsfeld, O. Böckmann, M. Schäfer, M. Böhm, and O. Sawodny, “Low Order Hybrid Model for Control Design of an Adsorption Facade System for Solar Cooling,” in Conference on Control Technology and Applications (CCTA), Triest, Italy, Aug. 2022.
- J. Wagner, S. Dakova, M. Böhm, and O. Sawodny, “Approximativ linearisierende Eingangstransformation zur aktiven Schwingungsdämpfung adaptiver Tragwerke mit druckschlaffen Elementen,” in GMA, Anif, Österreich, Sep. 2021.
- S. Dakova, J. L. Wagner, A. Gienger, C. Tarín, M. Böhm, and O. Sawodny, “Reconfiguration Strategy for Fault-Tolerant Control of High-Rise Adaptive Structures,” IEEE Robotics and Automation Letters, vol. 6, Art. no. 4, 2021.
- T. Kleine, J. L. Wagner, M. Böhm, and O. Sawodny, “Optimal actuator placement and static load compensation for a class of distributed parameter systems,” at-Automatisierungstechnik, vol. 69, Art. no. 9, 2021.
- T. Kleine, J. L. Wagner, M. Böhm, and O. Sawodny, “Optimal actuator placement and static load compensation for a class of distributed parameter systems,” at - Automatisierungstechnik, vol. 69, Art. no. 9, Sep. 2021, doi: 10.1515/auto-2021-0027.
- J. L. Wagner, M. Böhm, and O. Sawodny, “Decentralized structural control using Craig-Bampton reduction and local controller design,” in 2020 IEEE International Conference on Industrial Technology (ICIT), IEEE, 2020, pp. 41–46.
- J. L. Wagner and M. Böhm, “Decentralized Control Design for Adaptive Structures with Tension-only Elements,” in 21st IFAC World Congress, Berlin, Germany, Jul. 2020.
- J. Wagner, A. Gienger, P. Arnold, C. Tarin, O. Sawodny, and M. Böhm, “Optimal Static Load Compensation for Nonlinear Adaptive Structures,” in World Congress on Computational Mechanics (WCCM), Paris, online, Jul. 2020.
- A. Gienger, J. Wagner, M. Böhm, O. Sawodny, and C. Tarín, “Robust Fault Diagnosis for Adaptive Structures with unknown Stochastic Disturbances,” IEEE Transactions on Control Systems Technology, 2020.
- M. Böhm et al., “Modellierung aktiver Strukturelemente als Erweiterung zum klassischen Workflow der FE-Analyse,” in Manfred Bischoff, Malte von Scheven, Bastian Oesterle (Hrsg.) Berichte der Fachtagung Baustatik – Baupraxis 14, 23. und 24. März 2020, Universität Stuttgart, Institut für Baustatik und Baudynamik, Universität Stuttgart, 2020. doi: 10.18419/opus-10762.
- J. L. Wagner, M. Böhm, and O. Sawodny, “Decentralized control design for adaptive structures with tension-only elements,” IFAC-PapersOnLine, vol. 53, Art. no. 2, 2020.
- J. Wagner, M. Böhm, and O. Sawodny, “Decentrlized structural control using Craig-Bampton reduction and local controller design,” in ICIT, Buenos Aires, Feb. 2020.
- J. L. Wagner et al., “Optimal Static Load Compensation with Fault Tolerance in Nonlinear Adaptive Structures under Input and State Constraints,” Frontiers of Built Environment, 2020, doi: 10.3389/fbuil.2020.00093.
- J. L. Wagner et al., “Optimal Static Load Compensation with Fault Tolerance in Nonlinear Adaptive Structures under Input and State Constraints,” Frontiers in Built Environment, vol. 6, p. 93, 2020.
- A. Warsewa, J. L. Wagner, M. Böhm, O. Sawody, and C. Tarín, “Networked decentralized control of adaptive structures,” Journal of Communications, Jun. 2020, doi: 10.12720/jcm.15.6.496-502.
- A. Warsewa, J. L. Wagner, M. Böhm, O. Sawody, and C. Tarín, “Decentralized LQG control for adaptive high-rise structures,” in 21st IFAC World Congress, Berlin, Germany: IFAC, Jul. 2020.
- J. L. Wagner, K. Schmidt, M. Böhm, and O. Sawodny, “Optimal actuator placement and static load compensation for euler-bernoulli beams with spatially distributed inputs,” IFAC-PapersOnLine, vol. 52, Art. no. 15, 2019.
- J. Wagner, M. Böhm, and O. Sawodny, “Nonlinear Modeling and Control of Tension-only Elements in Adaptive Structures,” in SMART, Paris, Jul. 2019.
- J. Wagner, K. Schmidt, M. Böhm, and O. Sawodny, “Optimal Actuator Placement and Static Load Compensation for Euler-Bernoulli Beams with Spatially Distributed Inputs,” in Mechatronics, Wien, Sep. 2019.
- S. Weidner et al., “The implementation of adaptive elements into an experimental high-rise building,” Steel Construction, vol. 11, Art. no. 2, 2018, doi: 10.1002/stco.201810019.
- J. Wagner et al., “On steady-state disturbance compensability for actuator placement in adaptive structures,” at - Automatisierungstechnik, 2018, doi: 10.1515/auto-2017-0099.
- J. Wagner, M. Böhm, and O. Sawodny, “Model-Based Control of Integrated Fluidic Actuators for Adaptive Structures,” in WCCM, New York, Jul. 2018.
- J. Wagner et al., “Adaptives Tragwerk mit vollintegrierter Aktorik.” 2018.
- M. Heidingsfeld, “Modellierung, Systemanalyse und Regelung adaptiver Tragwerke am Beispiel von Seilfassaden,” 2018.
- J. Wagner et al., “Tragwerk mit adaptiven Aussteifungselementen.” 2018.
- J. Gade, R. Kemmler, M. Drass, and J. Schneider, “Enhancement of a meso-scale material model for nonlinear elastic finite element computations of plain-woven fabric membrane structures,” Engineering Structures, vol. 177, pp. 668–681, 2018, doi: 10.1016/j.engstruct.2018.04.039.
- J. Wagner, M. Böhm, and O. Sawodny, “Modellbasierte Aktorplatzierung für einen verteilten Eingriff am Euler-Bernoulli Balken zur optimalen statischen Kompensation,” in GMA, Anif, Österreich, Sep. 2018.
Contact

Spasena Dakova
M.Sc.Doctoral Researcher

Melanie Gschweng
M. Sc.Doctoral Researcher